Идея №1: робот-пылесос из картона
Основа робота делается из плотного картона. Его лучше склеить в пару слоев, а волокна разместить перпендикулярно. Для его технической начинки нужен такой набор деталей:
- Любая плата Arduino.
- Breadboard или простая макетная плата, в принципе можно и без неё, всё просто спаять.
- 2 ультразвуковых датчика расстояния (дальномер).
- Турбина от пылесоса.
- Небольшой двигатель или кулер от компьютера.
- Двигатели с редукторами и колеса.
- Контроллер для двигателя.
- Провода для соединений схемы.
- Аккумуляторы и контроллер заряда.
В качестве питания для робота нужно использовать 3 литиевых аккумулятора. Напряжение каждого из них 3,7 В. Для их заряда нужен контроллер. Например, такой как на фото:

Контроллер
Для управления двигателями привода робота удобно использовать модуль на L298-микросхеме. Схемотехнически это H-мост, вы можете его собрать своими руками из отдельных компонентов, но купить готовую плату будет надежнее. С его помощью вы можете задавать скорость движения робота-пылесоса и изменять направление вращения.
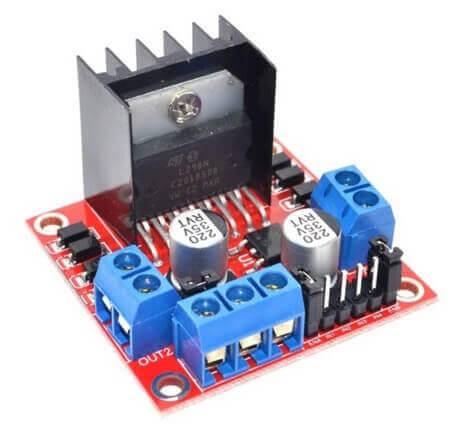
Модуль управления
Для регулировки скорости на пин ENA или ENB подаётся ШИМ сигнал, а для задания направления вращения подают разноименные сигналы на IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя. При этом если на пине IN1 у нас логическая единица, а на пине IN2 – логический ноль, двигатель крутится в одну сторону, чтобы сменить направление нужно поменять местами 1 с 0. Его нужно собрать с ардуино по такой схеме (пины можно использовать любые, это вы укажете в скетче).

Схема на ардуино
Далее нужно делать основу из картона и закрепить на ней колеса, должно получиться что-то вроде этого:

Основа из картона
Вот вид с нижней стороны. Два ведущих колеса с угловым редуктором и поворотное колесо:

Колесная база
Теперь нужно собрать схему, которая монтируется на основание. Диаметр основания должен быть около 30 см, чтобы туда влезла и электроника и сам блок пылесоса.

Сборка корпуса
Вместо дальномеров можно использовать вариант с бамперами, которые соединены с концевыми выключателями. При столкновении с препятствием система управления даст сигнал о смене направления движения.

Бампер
Контактные бампера можно сделать и своими руками, для этого нужен тонкий, но жесткий провод, например от витой пары. Для этого формирует контактную площадку на внутренней стороне бампера из фольги, и закрепляем проводник как это показано ниже. При столкновениях робота-пылесоса с мебелью и стенами они будут соприкасаться. Вам остается отрегулировать расстояние от проволоки до фольги, чтобы добиться нужной чувствительности и исключить ложные срабатывания. На фольгу подается 5В, а провод идёт на вход Ардуино, подтянутый к минусу через резистор на несколько кОм.

Самодельный контактный бампер
Устройство питается от аккумуляторов, для питания системы управления можно применить линейные стабилизаторы типа l7805. Чтобы отрегулировать скорость вращения моторов подойдет понижающий преобразователь, например LM2596.
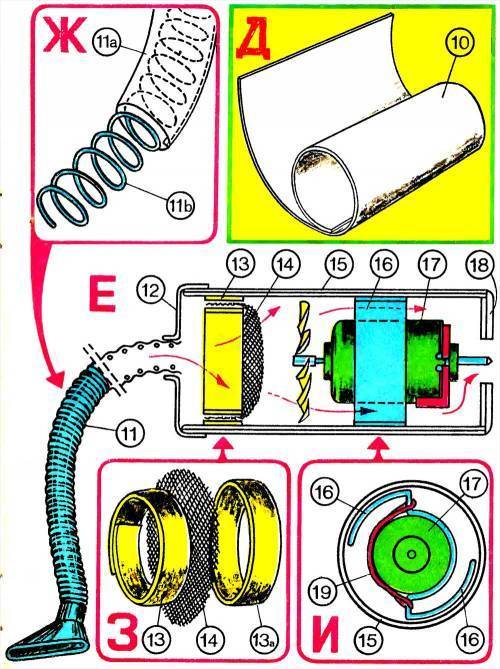
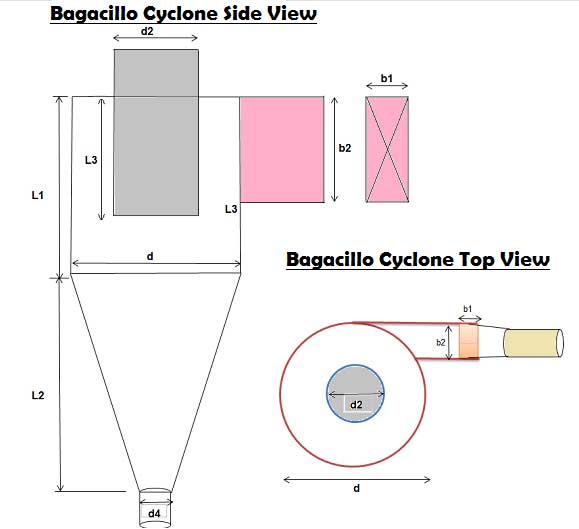
Самое сложное — это сконструировать и собрать пылесос. Вот его приблизительный чертеж:

Схема пылесоса
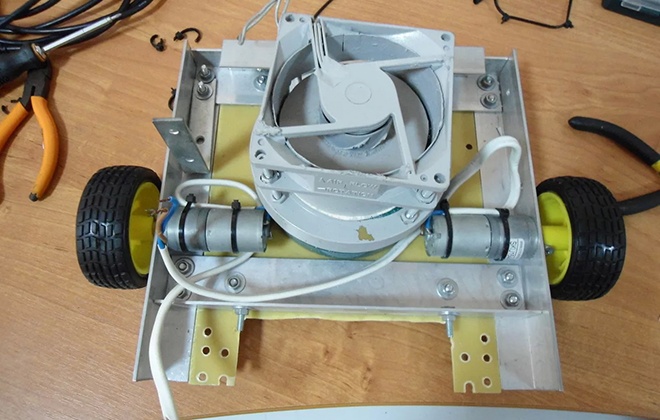
Отламываем родные лопасти от кулера, и закрепляем на его роторе турбину от пылесоса
Важно закрепить турбину точно в центре, иначе вы получите дисбаланс и вибрации

Турбина робота
Вот так выглядит обратная сторона турбины, закрепленной на роторе кулера. Закрепить её можно на термоклей или на суперклей

Вид турбины изнутри
Вот и вся пошаговая инструкция по сборке робота-пылесоса, сделанного из подручных материалов. Алгоритм его работы такой: робот-пылесос едет вперед, пока не встретит препятствие. После столкновения (или приближения, если вы используете УЗ дальномеры) останавливается, отъезжает назад на заданное расстояние, разворачивается на произвольный угол и едет дальше.


Теория
Самодельный робот-пылесос должен соответствовать различным требованиям. Основными можно назвать:
- Рекомендуется изготавливать конструкцию в форме небольшого цилиндра. Она исключает вероятность того, что устройство зацепится за различные объекты в помещении.
- Устройство должно разворачиваться на одном месте. Для этого нужно сделать колеса по периметру: 2 ведущих и 1 управляющий.
- Внутри конструкции должен располагаться приемник для мусора. Его форма и крепление должны обеспечивать легкое извлечение. При изготовлении контейнера часто применяется картон, верхняя крышка крепится магнитами. Предусматривается наличие фильтрующего элемента.
- Контактный бампер требуется для защиты пылесоса от ударов. Внутри этого элемента располагается датчик, срабатывающий при соприкосновении. Бампер изготавливается из поливинилхлорида, с наружной части может крепиться упругий материал.
- По периметру размещены ИК-датчики. Они предназначены для определения препятствий на пути.
- Зарядка устройства должна проводиться без разбора конструкции. Контроллер заряда позволяет исключить вероятность повреждения аккумулятора.
- Наилучшим местом для размещения центра тяжести являются колеса.
- Больше всего внимания уделяется выбору требуемого мотора. Он должен потреблять небольшое количество энергии, быть надежным.

Создать подобную конструкцию можно самостоятельно. Процесс делиться на несколько основных этапов:
- Подготовка требующихся материалов и инструментов.
- Изготовление основных частей.
- Монтаж датчиков, мотора, аккумулятора и других элементов.
- Выполняется электрическое подключение.
- Вводится требуемая программа, согласуется работа всех установленных датчиков.
Финишный этап предусматривает проверку работоспособности самодельного устройства.
Как можно самостоятельно изготовить домашнего робота уборщика полов
Для сбора автоматизированного прибора самостоятельно следует задуматься какими особенностями он должен обладать:

- небольшие размеры и компактность
- производить немного шума
- обладать вместительным контейнером для сбора мусора
- расходовать немного энергии
Для самостоятельно сборки следует придерживаться упрощенной схемы: широкая щетка направляет мусор к центральному отверстию, для последующего сбора его в пылесборник.
Дальше следует задуматься о турбине и двигателе, которые можно произвести своими руками, а можно заранее приобрести в магазине.
Для более качественной очистки можно изготовить боковые щеточки, для самодельной щетины подойдет щетка для обуви. Боковые щетки позволят увеличить скорость передвижения. Щетка подключается к моторчику, приводящему в движение.
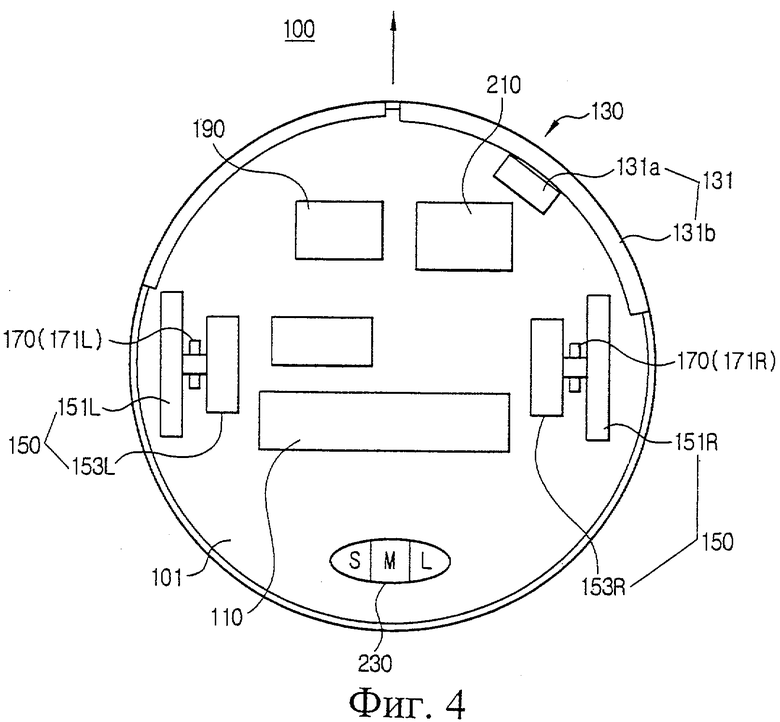
Механическая часть робота представлена на картинке:
Что необходимо для движения и бесперебойной работы?
Основной составляющей является электроника и программа робота. Способы движения уборки: по спирали, параллельно, зигзагом и т.д. В микроконтроллеры следует занести схемы движения и план комнаты.
Для движения и обнаружения препятствий робот оснащается контактным и ИК датчиками. ИК позволяют улавливать препятствия, перепады высоты, контактный срабатывает при ударах об преграды.
Для автономности работы можно использовать батарею, с помощью которой будет осуществляться питание робота. Рекомендуется поставить хотя бы два блока питания. Беспроводной способ питания увеличивает дополнительные расходы. Для возвращения аппарата для подзарядки можно установить звуковые маячки, либо переносить агрегат самостоятельно.
В схеме самостоятельной сборки рассмотрим модель на базе контроллера, его еще называют мозгом системы. Модель, пылесосящую на ардуино рассмотрим ниже. Необходимое программное обеспечение позволит настроить аппарат для поставленных задач. Следует занести алгоритмы команд, для этого надо знать язык программирования.
Как сделать робот-пылесос своими руками: алгоритм производства домашнего помощника
Робот-пылесос – нужная машина. Но у нее есть один существенный недостаток – цена.
Хорошая модель стоит недешево, а дешевая модель больше напоминает игрушку, но за нее тоже нужно заплатить определенную сумму.
Поэтому народные умельцы предпочитают собирать такие системы самостоятельно, благо в продаже для этого есть все комплектующие.
Многие из них охотно рассказывают, как сделать пылесос-робот своими руками.
Самое важное в этом деле, кроме необходимой базы запчастей, — почувствовать себя настоящим конструктором и не бояться экспериментировать. А получившуюся модель всегда можно улучшить
1 Ковры с длинным ворсом
В характеристиках роботов-пылесосов часто указывается возможность очистки ковров — но это может оказаться правдой лишь частично. Если речь идет о ковровых покрытиях с длиной ворса 10 мм, удалить с них пыль и даже шерсть животных сможет даже бюджетный пылесос с силой всасывания не больше 2000 Па. Для средневорсовых ковров понадобится более производительное устройство — такое, как Xbot L7 Pro.
Если ворс покрытия длинный, от 3–4 см, большинство моделей не только не смогут очистить пол от загрязнений, но даже въехать на них. Эффективность в этой ситуации будет минимальной, а покупка прибора — бесполезной тратой денег. К тому же перед уборкой ковров нужно будет еще и снять боковые щетки — так рекомендуют поступать производители.
Чтобы справиться с длинноворсовыми коврами, не обойтись без настоящего пылесоса — сетевого, с силой всасывания от 5 до 20 кПа и выше, то есть в несколько раз больше, чем у роботизированной модели. Он очистит мягкое напольное покрытие от аллергенов, грибка, клещей, бактерий, вирусов и начисто уберет шерсть питомцев.
2 Игрушки в детской комнате
Робот-пылесос часто покупают люди, которым не хватает времени на полноценную уборку. В том числе люди с маленькими детьми. Кажется, будто автоматический помощник должен облегчить быт, но на самом деле он окажется безделушкой.
На полу детской комнаты часто лежат игрушки, убирать которые в коробки и шкафы бесполезно — они снова будут разбросаны. Если бюджетный робот-пылесос натыкается на эти предметы, он может засосать внутрь деталь или просто застрять.
Покупать простенький «умный пылесос» для уборки квартир, в которых живет маленький ребенок, нет смысла. В детской все равно придется убирать руками. Но можно присмотреться к модели, которая позволяет назначать запретные зоны и ставить виртуальные стены. Ищите такие в нашем рейтинге роботов-пылесосов 2022.
3 Большое количество мебели
Уборка комнат, в которых расположено слишком много мебели, особенно стульев, может оказаться слишком сложной для роботов-пылесосов. Большое количество препятствий создает проблемы даже для моделей с лазерными или оптическими датчиками.
Дело в том, что даже самый компактный робот-пылесос представляет собой впечатляющих размеров «шайбу». Он просто не может пролезть между ножек стульев, да и кресло на колесах не позволит ему убраться под столом. Это может показаться странным, но дорогие роботы убираются не лучше. На их верхней крышке часто расположена башенка лидара, которая добавляет полтора-два сантиметра к высоте устройства. В результате оно просто не помешается под диван или шкаф, пространство под мебелью останется в нетронутом виде.
Если мебели много, быстрее, проще и качественнее убираться с помощью беспроводных моделей.
4 Пушистые питомцы
Проблему для уборки могут создавать и домашние животные — особенно, с большой длиной шерсти и периодическими периодами линьки. Из-за них мусора в помещениях становится больше. А при уборке шерсть попадает в пылесборник вместе с другим мусором и быстро забивает отсек.
Рекомендации по эксплуатации
Современная техника для «умного дома» требует особенного ухода. Если соблюдать рекомендации касаемо эксплуатации такого оборудования, робот может прослужить не один год.
Правила использования оборудования:
- протирать пылесос нужно только сухой тряпкой;
- если робота не планируется использовать в ближайшее время, лучше вытащить аккумулятор;
- перед началом уборки уберите с пола мелкие и хрупкие предметы;
- не трогайте зарядное устройство или робота мокрыми руками;
- не убирайте при помощи робота химические вещества и краску;
- регулярно нужно очищать контейнер и колесико.
Используя такую технику для дома правильно, можно существенно сэкономить свое время.
Особенности изготовления робота-пылесоса дома
Теоретические аспекты
Робот должен иметь форму колеса или диска, чтобы он мог правильно двигаться,
- Колеса расположены по диаметру метлы так, чтобы она могла вращаться,
- Центр тяжести лучше всего находится на колесах, но может быть и рядом с ними,
- Средняя скорость машины составляет 25-35 см/сек,
- Для робота-уборщика требуется контактный буфер не менее 0,5 от окружности,
- Зарядка импровизированного робота должна осуществляться через зарядное устройство, Устройство не требует разборки,
- Пыль и мусор должны собираться в отдельный контейнер, который можно извлечь и очистить.
- Совет. Отметьте на чертеже все компоненты вашего будущего пылесоса и их приблизительные размеры. Используйте стрелки для указания направления движения воздуха и всасываемых частиц пыли. Четкость чертежа — это шаг к успешной сборке.
Как сделать чертёж
Для схематического чертежа нам необходимо определить, какие компоненты необходимы в проекте:
Плата Arduino — «мозг» будущего робота,
Турбина от старого пылесоса,
Небольшой мотор (подойдет старый компьютерный холодильник),
Дальномеры — 2 шт,
Колеса (предпочтительно 2 обычных и 1 вращающееся), мотор-редукторы,
Блок управления (для двигателя),
3 литиевые батареи,
контроллер для зарядки,
проводка,
Тяжелая картонная коробка.
Это важно: если вы не можете найти старую турбину, вы можете сделать ее самостоятельно из плотного картона. Принципиальная схема прилагается.. Далее необходимо подключить двигатель к Arduino
Сделайте круг из картона и поместите в него колеса (подумайте о диаметре около 30-35 см для «начинки»). Используйте обычные колеса с обеих сторон, но с угловыми редукторами, и вращающееся колесо между ними для гибкости
Далее необходимо подключить двигатель к Arduino. Сделайте круг из картона и поместите в него колеса (подумайте о диаметре около 30-35 см для «начинки»). Используйте обычные колеса с обеих сторон, но с угловыми редукторами, и вращающееся колесо между ними для гибкости.


Особенности проведения сборки
Поместите все электронные компоненты и капот на построенное вами основание. Прикрепите дальномер спереди.
Следующий шаг — строительство турбины. Для этого снимите ребра компьютерного кулера и приклейте горячим клеем турбину, сделанную из старого пылесоса. Вставьте его точно посередине: вам не нужен дисбаланс.
Бока метлы можно сделать самостоятельно. Помните: он должен быть цилиндрическим.
Необходимые инструменты и материалы
Для изготовления самодельной конструкции требуются материалы и набор инструментов. Они следующие:
Контролер типа Arduino с соответствующими драйверами. Этот элемент можно приобрести в специализированном магазине. Контроллер после установки рекомендуется защитить от воздействия окружающей среды.
Лист фанеры применяется для создания основания. В некоторых случаях изготавливается корпус из поливинилхлорида, т. к. этот материал более надежный в применении.
Для обеспечения подвижности устанавливается 3 колеса. Они должны быть небольшого размера, поверхность изготавливается из материала с высокой степенью сцепления.
Провода сечением 0,75 мм² нужны для соединения отдельных элементов. Компактность конструкции определяет то, что требуется относительно небольшое количество провода.
Блок питания представлен 4 аккумуляторами по 18V
Также уделяется внимание тому, какие используются зарядные устройства. На момент работы источник питания может нагреваться до высокой температуры
Поэтому батареи должны быть изолированы от других материалов.
4 инфракрасных и 2 контактных датчика используются для определения положения устройства. Инфракрасные размещаются по периметру, контактные располагаются внутри бампера.
Клей, саморезы и другие крепежные элементы.
Набор отверток, паяльник, нож, карандаш, шуруповерт и некоторые другие инструменты.

Картонный элемент изготавливается для получения основания. Щетки по бокам существенно повышают эффективность создаваемого устройства,
Подготовка к практической реализации проекта
Рассмотрим применение описанных выше принципов к платформе Arduino Mega 2560. Процесс строительства состоит из нескольких этапов:
- Подготовка инструментов и материалов,
- Подготовка и заготовка материалов, подготовка инструментов и оборудования, строительство корпуса с колесами и отсеком для отходов, пылесборника и турбины,
- установка датчиков и микроконтроллера, двигателей с редукторами, аккумулятора, щеток,
- выполнение электрических соединений,
- Ввод программы в Arduino, определение согласованности датчиков,
- Проверка функциональности робота-пылесоса и его способности к самозарядке.
Концепция реализуется с использованием следующих материалов и инструментов:
- Контроллер Arduino — 1 штука, с драйверами,
- Фанерный лист (или картон) — 1 м2,
- картон (картон, картонная коробка, картонная коробка, картонная коробка, картонная коробка, картонная коробка — 3 шт,
- Источник питания — 4 батареи 18 В, индикатор заряда для них, зарядное устройство,
- инфракрасные датчики — 4 шт, контактные датчики — 2 шт,
- Моторы: 1 шт. для турбины и 1 шт. для щетки; 2 мотор-редуктора обеспечивают движение,
- корпус из поливинилхлорида — 1 шт,
- клей — 1 упаковка, саморезы — 10 штук, клейкая лента — 1 штука, набор магнитов,
- набор отверток и бит, плоскогубцы, кусачки, карандаш, линейка, шуруповерт, лобзик.
- Автомобильный пылесос, как следует из названия, предназначен для уборки салона автомобиля. Его компактные размеры обеспечивают доступ в самые труднодоступные места. Некоторые пылесосы могут всасывать жидкости, что особенно полезно зимой, когда на ковре стоят лужи талого снега.
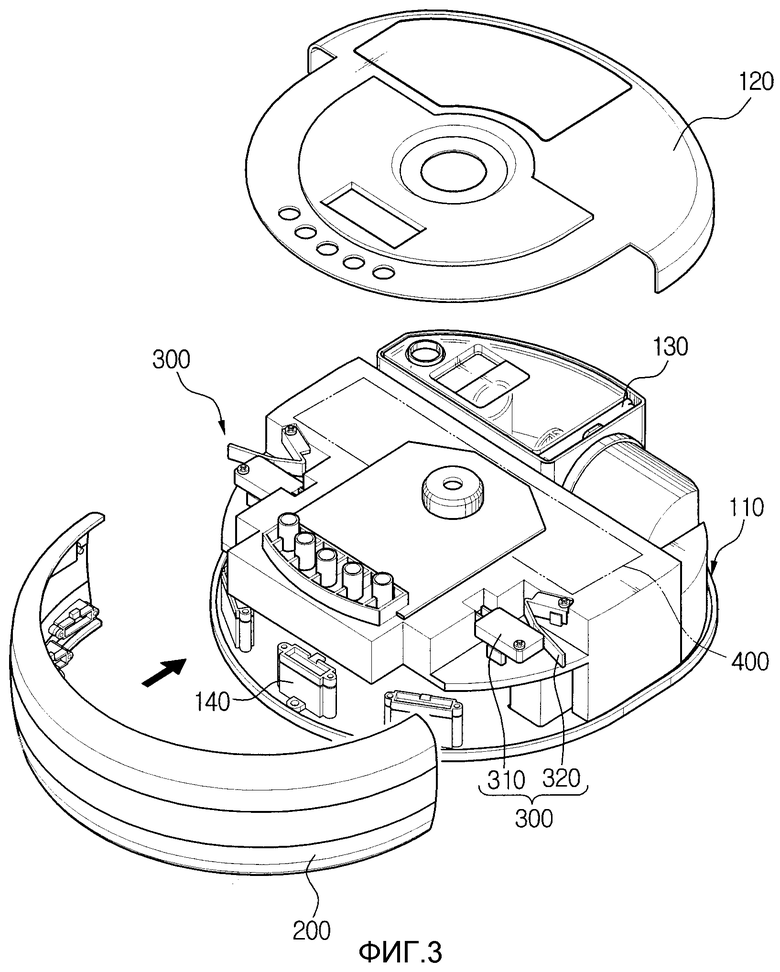
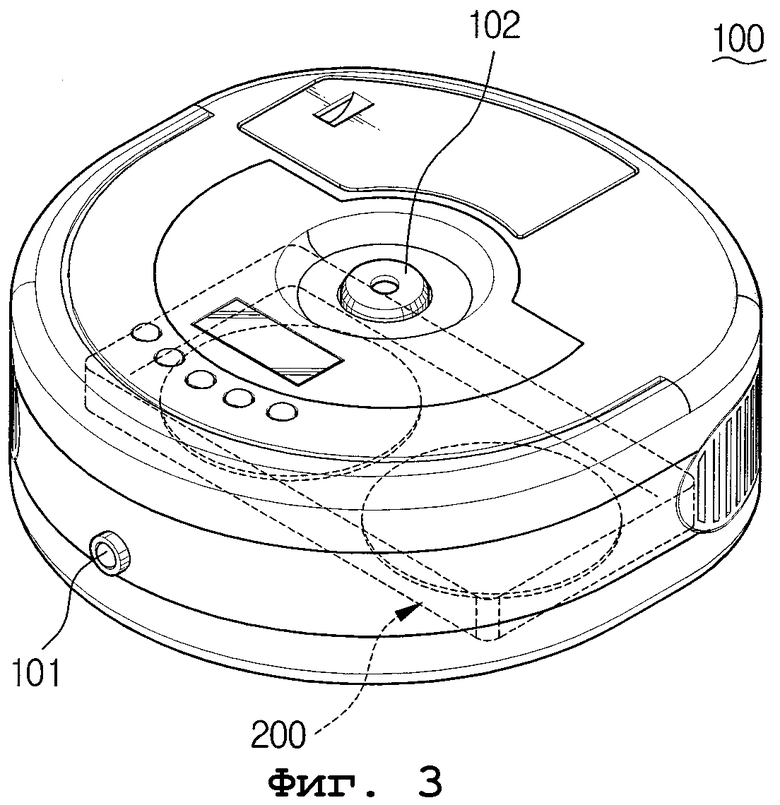
Описание самодельного робота пылесоса
Если вы хотите создать механизм, который будет идеально подходить для очистки поверхностей пола в вашем доме, вам следует внимательно соблюдать все правила, которые предписывает схема сборки, представленная в следующем пункте.
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;

- инфракрасные датчики имеют 4 выхода подключения к системе «Ардуино». При этом обычный режим работы подразумевает выдачу логической единицы, а ситуация, в которой хотя бы один из датчиков системы срабатывает — логический ноль;
- если ИК-датчик не сработал, а пылесос тем не менее наткнулся на какое-либо препятствие, его бампер нажмет на переключатель, что спровоцирует откат устройства на несколько сантиметров назад. После этого будет произведен разворот, а работа продолжится. Переключатели при этом нужны достаточно мощные, чтобы своевременно устанавливать бампер в исходное положение;
- мотор, отвечающий за движение передней щетки, подключается в Arduino через MOSFET. При этом в том случае, когда робот-пылесос находится в движении, щетка вращается достаточно медленно для того, чтобы пыль, грязь и мусор не разбрасывались по комнате, а, наоборот, собирались вместе и втягивались в жерло. А если робот находится возле стены или угла, щетка ускоряет темп своей работы, так как большинство пыли и грязи как раз и скапливается вдоль плинтусов;
- питание робота пылесоса осуществляют 4 литийионных аккумулятора, а также понижающий преобразователь переменного тока. Каждая пара вышеупомянутых литийионных аккумуляторов подключена последовательно;
- основание устройства изготовлено из высокопрочной фанеры;
- конструкция устройства подразумевает наличие 3 шариковых колес;
- все щетки робота-пылесоса изготовлены из достаточно жесткой лески.
Схема проекта
Схема робота-пылесоса на основе платы Arduino представлена на следующем рисунке.
Для обнаружения препятствий мы в схеме робота используем три ультразвуковых датчика. Их контакты питания подключены к общему питанию схемы, а земля – к общему проводу схемы. Управляющие (trigger) и выходные контакты (echo pins) датчиков подключены к ШИМ (широтно-импульсная модуляция) платы Arduino. Инфракрасный датчик также запитывается от общих VCC и земли (ground) схемы, а его выходной контакт подключен к цифровому контакту D2 платы Arduino. У драйвера двигателя мы два его контакта, разрешающих его работу (enable pins), подключили к 5 В, также контакт подачи питающего напряжения мы подключили к 5 В поскольку мы используем электродвигатели, работающие от напряжения 5 В. Поскольку наш робот-пылесос запитывается от литий-ионной батареи напряжением 7.4 В, а все компоненты схемы питаются от напряжения 5 В, то для преобразования напряжения 7.4 В в напряжение 5 В мы используем регулятор напряжения LM7805.
Инфракрасный датчик для обнаружения лестниц
Для того, чтобы наш робот-пылесос мог обнаруживать лестницы и не падать с них, мы будем использовать инфракрасный датчик (IR Sensor). Принцип его действия достаточно прост – он содержит в своем составе излучающий инфракрасный диод (IR LED) и фотодиод. Излучающий инфракрасный диод излучает инфракрасный свет и если на его пути встречается препятствие, то он отражается от него и улавливается (принимается) фотодиодом. Но напряжение на выходе фотодиода достаточно мало, поэтому для его усиления до необходимого уровня в составе датчика содержится компаратор на основе операционного усилителя.
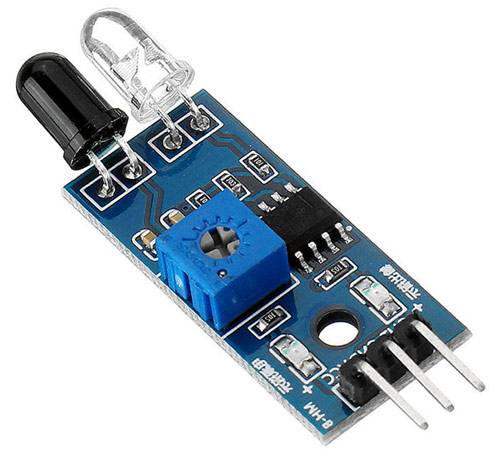
Инфракрасный датчик содержит 3 контакта – Vcc (питающее напряжение), ground (общий провод, земля) и output (выход). Когда вблизи датчика есть препятствие, то на его выходе формируется напряжение низкого уровня (low). Поэтому данный датчик мы можем использовать для обнаружения пола комнаты. Если он передвигается по полу, то на выходе датчика будет low. Если же на выходе датчика мы неожиданно обнаружим напряжение высокого уровня, то мы должны либо остановить робота, либо двигать его в обратном направлении, либо сделать что-либо другое чтобы предотвратить его падение с лестницы.
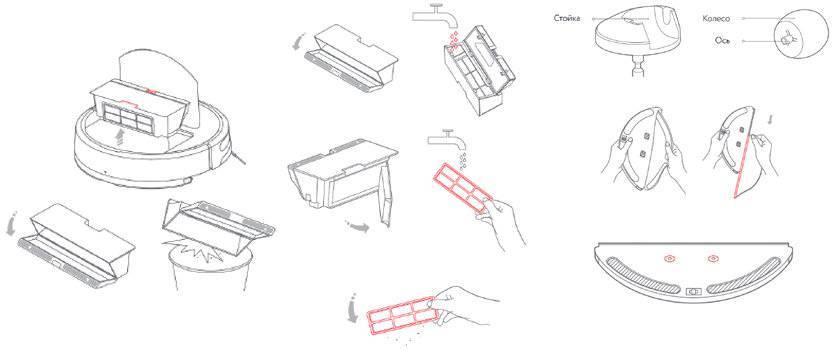
Уход за боковыми щетками
Теперь поговорим о том, как почистить боковые лопастные щётки от шерсти, волос и прочей грязи. У некоторых моделей может быть одна щётка, как у большинства роботов-пылесосов Xrobot. При обслуживании и уходе за роботизированным пылесосом многие пользователи не придают значения данному мероприятию. Однако, если не почистить щёточки своевременно, их моторчики могут попросту сгореть.
Уход за боковыми щетками
Для того, чтобы очистить лопастную щётку, нужно аккуратно при помощи крестовой отвёртки открутить винт, который её фиксирует, и снять с вала робота-пылесоса, слегка потянув. Периодичность очистки боковых щёток – примерно один раз в неделю при наличии домашних питомцев в доме, или раз в две-три недели при обычных условиях эксплуатации.
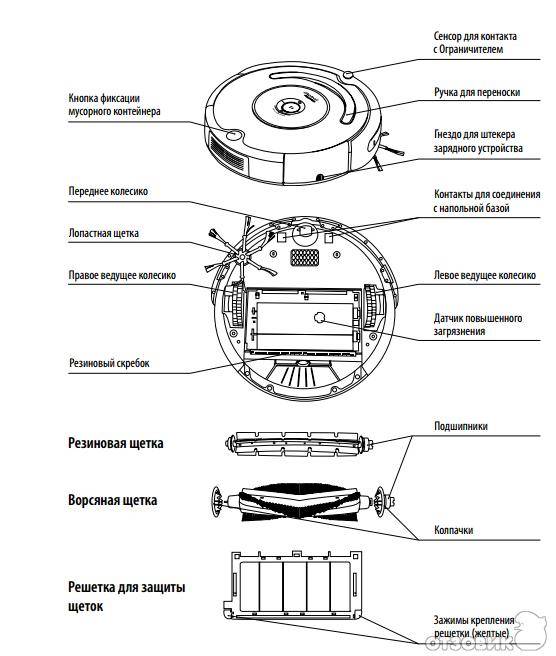
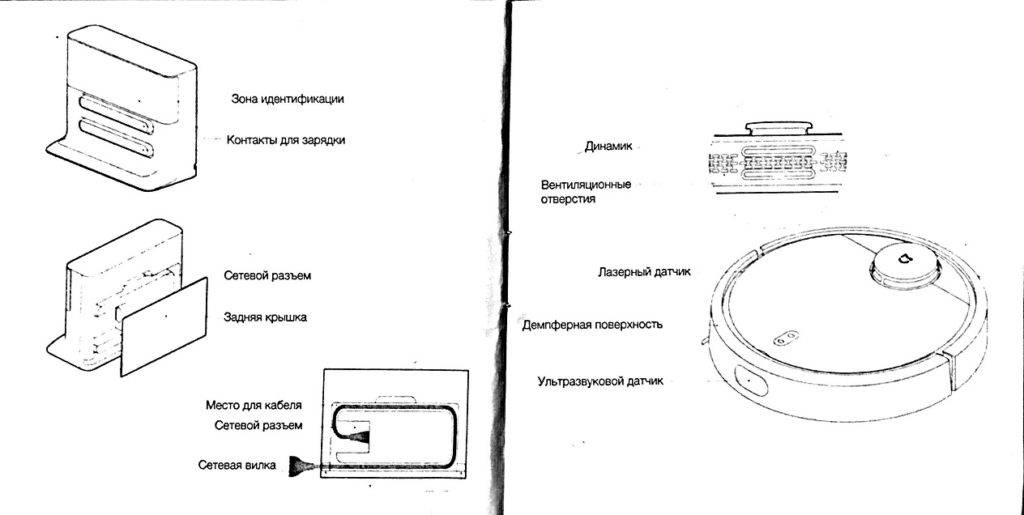
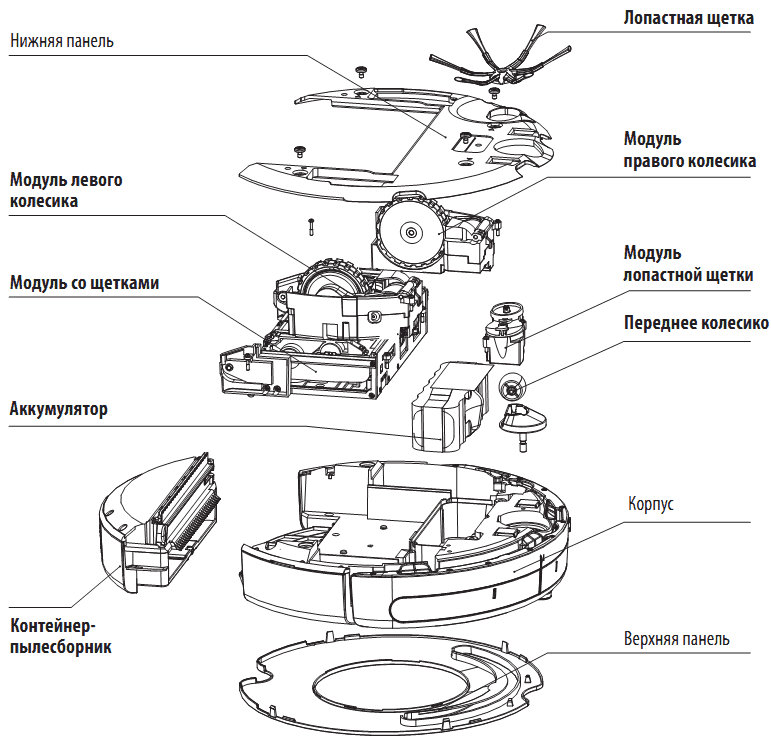
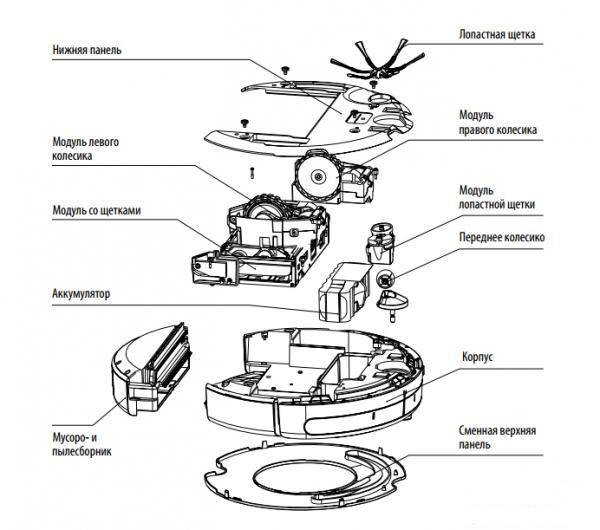
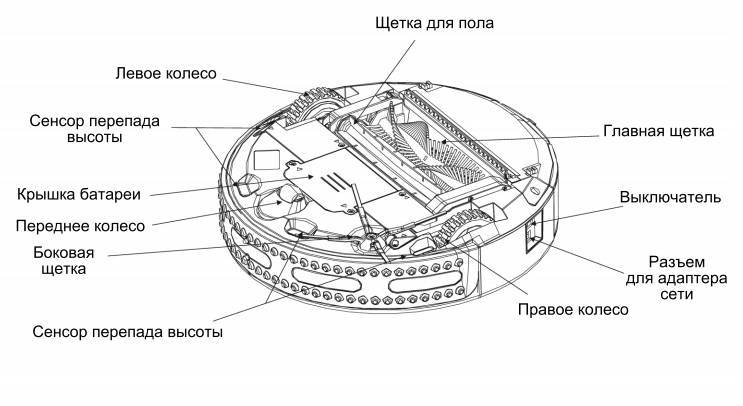
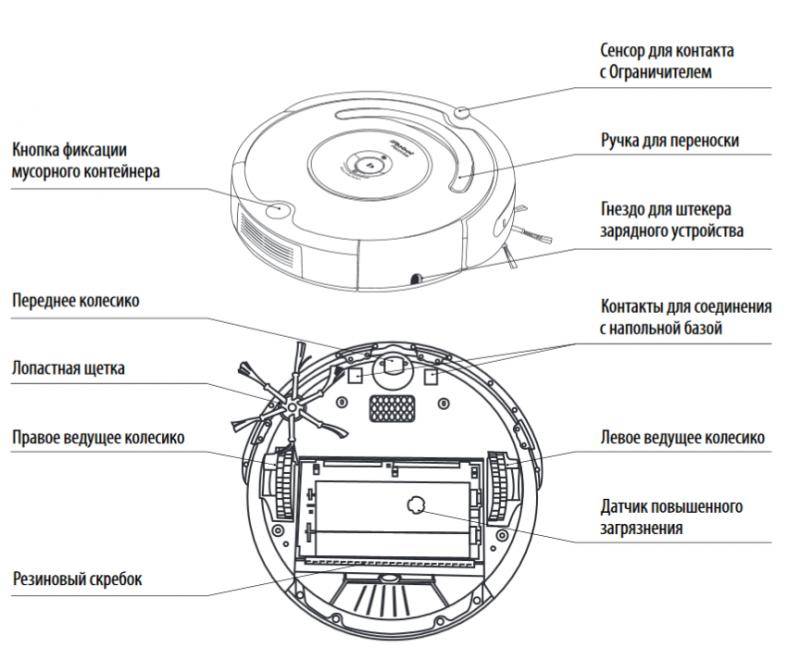
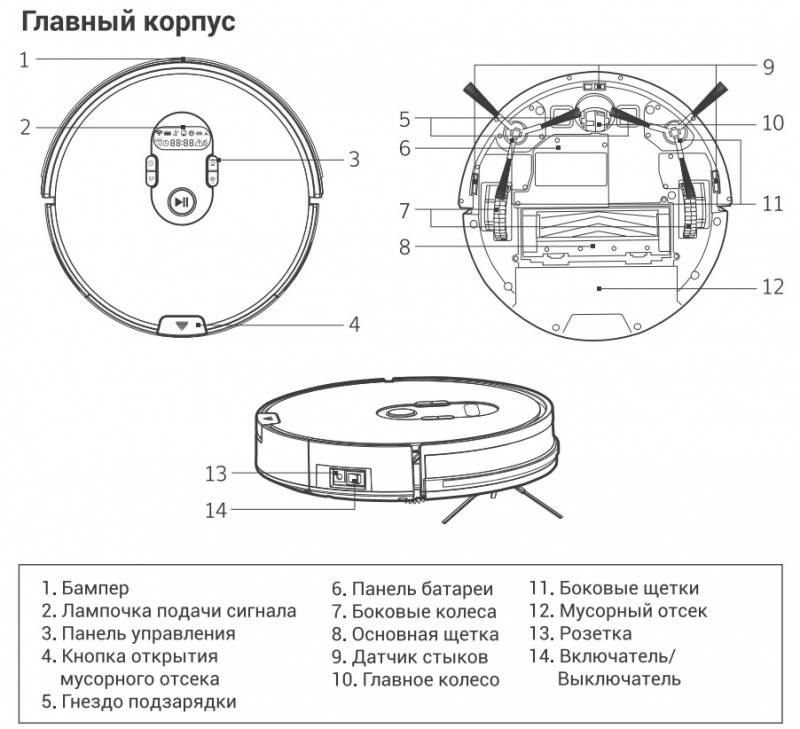
Конструкция робота пылесоса
Современный рынок предлагает потребителю невероятный ассортимент моделей умных уборщиков, которые отличатся габаритами, способом ориентирования, алгоритмом действий и наличием дополнительных возможностей. Внешне, большинство моделей данной категории выглядят в виде диска из ударопрочного и легкого полимера с установленным на нем бампером, предотвращающим повреждение устройства при столкновении с препятствием.
В зависимости от модели диаметр устройства может быть от 250 до 350 мм. Высота от пола до верхней точки корпуса не более 130 мм.
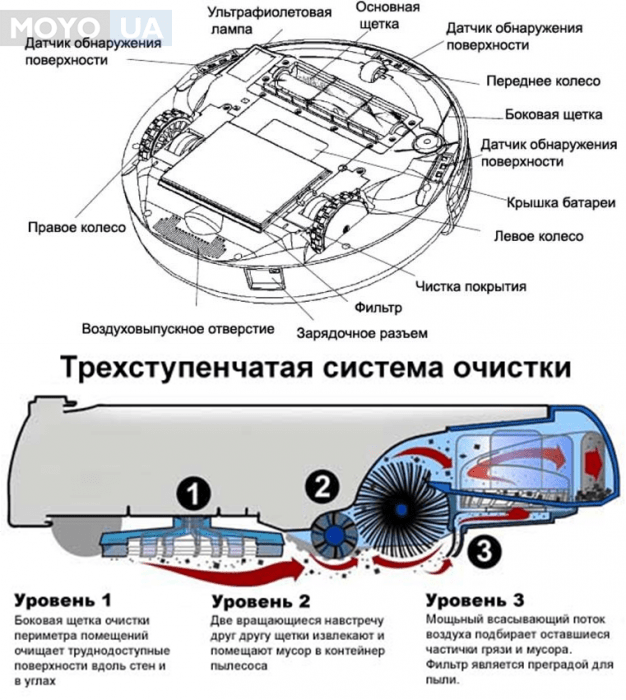
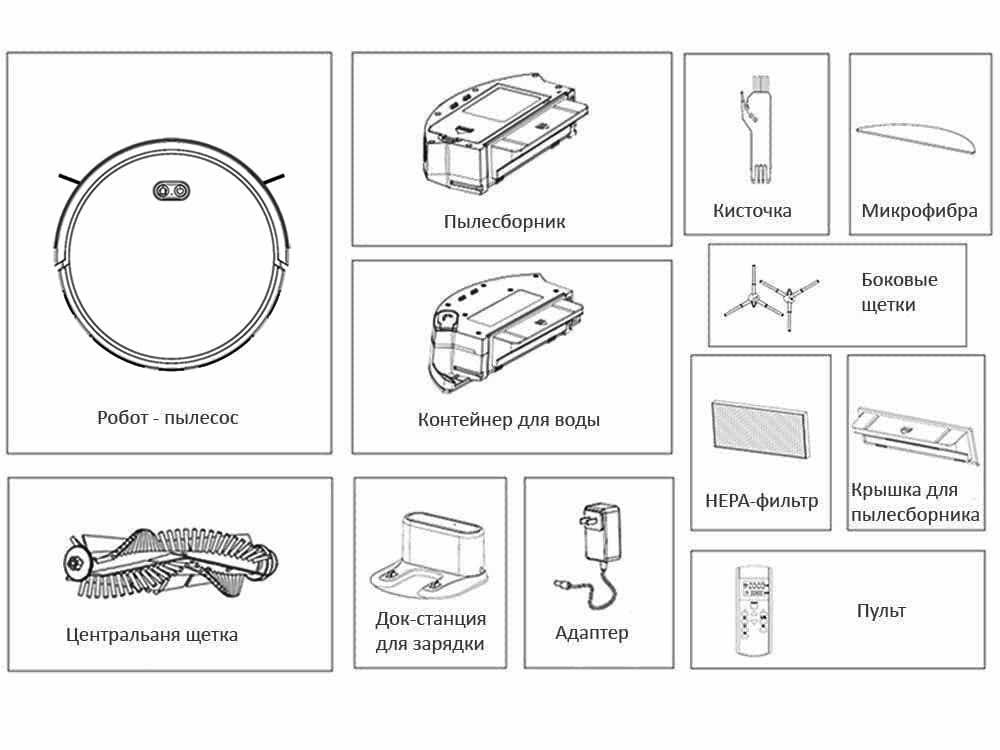
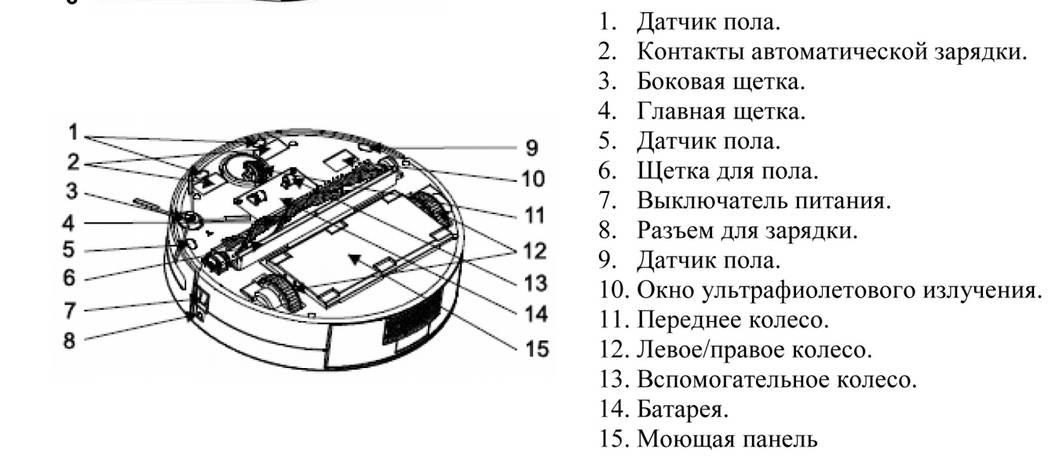
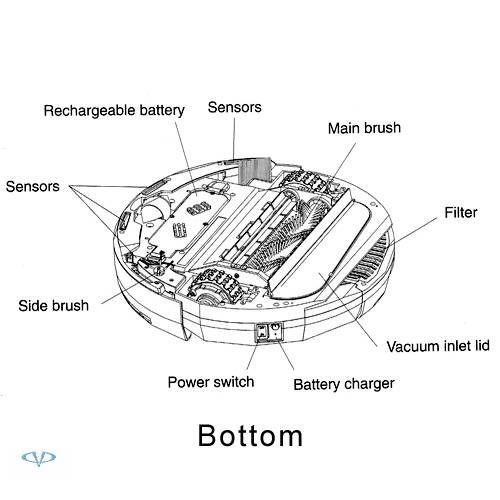
Устройство бытового робота пылесоса включает в себя следующие элементы и механизмы:
- Видеокамеру, которая дает прибору возможность ориентирования. Благодаря камере робот составляет карту перемещения и корректирует план уборки.
- Пылесборник — съемный, пластиковый, многоразовый контейнер с емкостью от 0,4 до 1 л, который вынимается из корпуса нажатием специальной кнопки.
- Фильтры очистки, предназначенные для очистки от пыли выходящих из устройства воздушных потоков. Конструкция фильтроэлементов дает возможность владельцу проводить их обслуживание самостоятельно.
- Мощный механизм всасывания, который в совокупности с продуманной системой перемещения щеток, обеспечивает качественную уборку при крайне низком уровне шума.
- Датчики необходимы для сканирования пространства, отслеживания пройденного расстояния, определения препятствий, «обрывов» и участков с максимальным загрязнением.
- Колеса для передвижения. Практически все модели роботов-пылесосов оснащены тремя колесами: два боковых отвечают за перемещение устройства; колесо в передней части является вспомогательным. Управление осуществляется переменной передачей крутящего момента на каждое их боковых колес.
- Li-Ion аккумулятор. Емкость батареи от 2 до 4 А/ч, чего достаточно для работы без подзарядки в течении 2-3 часов. Время полной зарядки от 3 до 9 часов.
- Щетки для уборки обеспечивают захват мусора и перемещение его к механизму всасывания.
- Пазы для полотера, предусмотрены в моделях для влажной уборки.
За передвижение и управление устройством отвечают электромоторы, которых, в зависимости от модели может быть 5 или 6.
- По одному мотору на каждое ведущее колесо.
- Один отвечает за работу механизма всасывания.
- Один управляет вращением боковой щетки (в моделях с двумя боковыми щетками задействовано два силовых агрегата).
- Последний отвечает за вращение турбощетки.
 Как устроен робот-пылесос?
Как устроен робот-пылесос?
Описание и назначение
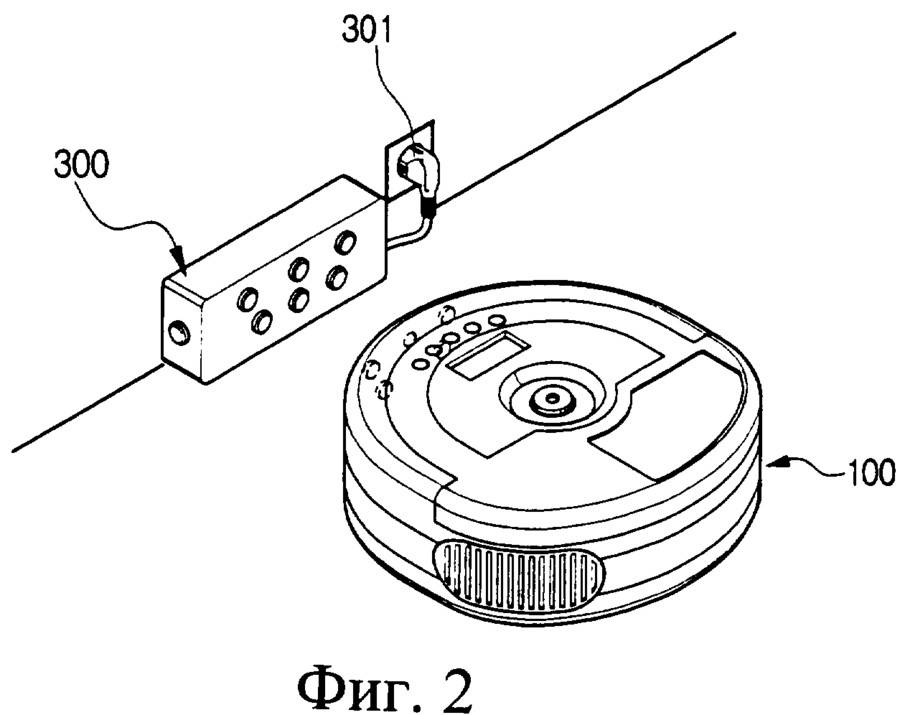
Производители таких устройств оснащают свои изделия разными функциями. Это помогает сделать их работу более качественной. Для улучшения эксплуатационных характеристик используется виртуальная стена.
Под этим термином понимают особое приспособление, которое помогает пылесосу ориентироваться в комнате. Устройство дает возможность разделять помещение на зоны. Благодаря его использованию робот не сможет покинуть комнату, в которой проводится уборка. Виртуальная стена используется при потребности в ограничении доступа прибора к хрупким предметам. Это может быть напольная ваза или посуда с кормом домашних питомцев. В подобных ситуациях приспособление будет очень актуальным.
Теория
Самодельный робот-пылесос должен соответствовать различным требованиям. Основными можно назвать:
- Рекомендуется изготавливать конструкцию в форме небольшого цилиндра. Она исключает вероятность того, что устройство зацепится за различные объекты в помещении.
- Устройство должно разворачиваться на одном месте. Для этого нужно сделать колеса по периметру: 2 ведущих и 1 управляющий.
- Внутри конструкции должен располагаться приемник для мусора. Его форма и крепление должны обеспечивать легкое извлечение. При изготовлении контейнера часто применяется картон, верхняя крышка крепится магнитами. Предусматривается наличие фильтрующего элемента.
- Контактный бампер требуется для защиты пылесоса от ударов. Внутри этого элемента располагается датчик, срабатывающий при соприкосновении. Бампер изготавливается из поливинилхлорида, с наружной части может крепиться упругий материал.
- По периметру размещены ИК-датчики. Они предназначены для определения препятствий на пути.
- Зарядка устройства должна проводиться без разбора конструкции. Контроллер заряда позволяет исключить вероятность повреждения аккумулятора.
- Наилучшим местом для размещения центра тяжести являются колеса.
- Больше всего внимания уделяется выбору требуемого мотора. Он должен потреблять небольшое количество энергии, быть надежным.
Создать подобную конструкцию можно самостоятельно. Процесс делиться на несколько основных этапов:
- Подготовка требующихся материалов и инструментов.
- Изготовление основных частей.
- Монтаж датчиков, мотора, аккумулятора и других элементов.
- Выполняется электрическое подключение.
- Вводится требуемая программа, согласуется работа всех установленных датчиков.
Финишный этап предусматривает проверку работоспособности самодельного устройства.
Заключение
Рассмотренные самодельные модели роботов-пылесосов хороши для проведения быстрых уборок, когда нужно подмести полы.
Чтобы подобные аппараты могли хорошо втягивать и пыль – недостаточно обычного вентилятора от компьютера.
Нужно использовать более мощные моторы, например, от фена, и лопасти нужно изготавливать другой конструкции.
В этих же моделях для лучшего эффекта всасывания нужно соблюсти расстояние от дна до пола не более 1 см.
Робот-пылесос самодельной конструкции нельзя использовать в местах, где есть возможность падения его с высоты.
В простой системе не предусмотрены датчики контроля уровня пола. В сети имеются лайфхаки как сделать пылесос-робот моющим.